RedEdge-MX 操作教學:從設定、校正到起飛

RedEdge-MX setting: from setup, calibration to takeoff.
無人機 (UAV) 是相當熱門的興新產業,從市政規劃、農業到軍事都可以看到它的身影。而農用無人機方面除了裝配藥箱進行空中施藥以防治病蟲害之外,更可搭載相機、紅外線感測器與多光譜儀來收集及評估植株的生長狀況。朋友之前也買了一台 RedEdge-MX 來執行相關計畫案的研究,以下糊塗流浪貓將介紹這台多光譜儀的設定與操作步驟。
操作流程
- 啟動機器並關閉連拍
- 姿態校正
- 拍攝光譜校正板
- 啟動連拍模式
- 起飛習翠
- 降落,完成拍攝任務
- 關閉拍攝
- 檢視SD卡空間。
啟動並連線 RedEdge
接上電源,手機連上機器的 WIFI,手機瀏覽器輸入網址: 192.xxx.xxx.254,於首頁中確認所有項目皆為綠燈。

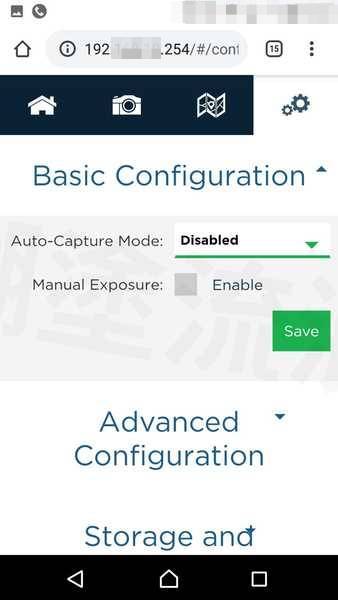
關閉連拍
進入 Basic Configuration,將 Auto-Capture Mode 選擇為 Disabled 後存檔。
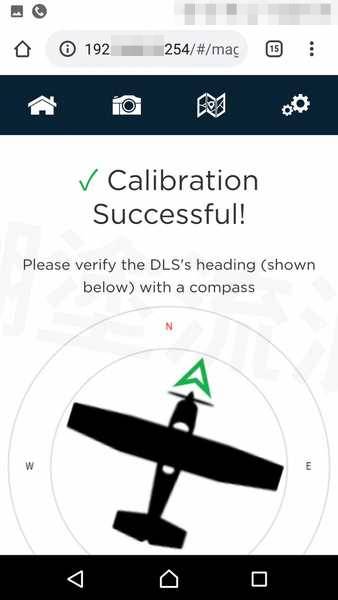
無人機姿態校正
進入 Basic Configuration,於 DLS Configuration 中選擇 Calibrate DLS Mag 後按下 Start 開始校正。

校正順序
- Top Up
- Up Down
- Left Wing Up
- Nose Down
- Right wing Up
以綠色線頭方向為前方,黑點維持在中心,依指示開始360度旋轉,讓白色區塊變為綠色。

拍攝校正板
將相機對準校正板 QRcode 後,進入相機頁籤點擊 Capture。

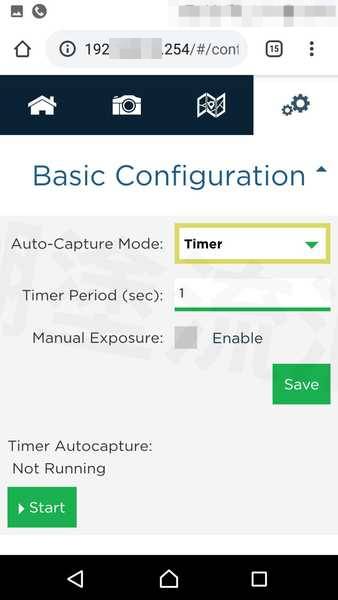
重啟連拍模式
校正照片完成後,到 Basic Configuration,將Auto-Capture Mode 設回 Timer,按下 Start 開始連拍後即可起飛。
拍攝完成
無人機降落後用手機連入機器內,進入 Basic Configuration,按下 Stop 停止連拍。確認記憶卡內的空間是否足夠。
延伸閱讀



留言
張貼留言
由於廣告留言太多,因此改採審核發佈,請耐心等候。
無法留言?請點我